사양
| 기타 |
| 무게 |
17 g |
| 모터 |
| DC 모터까지 |
250 W |
| EC 모터까지 |
250 W |
| 센서 |
| 엔코더 미장착 (DC 모터) |
예 |
| 디지털 인크리멘탈 엔코더 (2 채널, 싱글엔드) |
예 |
| 디지털 인크리멘탈 엔코더 (2 채널, 디퍼런셜) |
예 |
| 디지털 인크리멘탈 엔코더 (3 채널, 디퍼런셜) |
예 |
| 디지털 홀센서 (EC 모터) |
예 |
| SSI 앱솔루트 엔코더 |
예 |
| 아날로그 인크리멘탈 엔코더 (2 채널, 디퍼런셜) |
예 |
| 작동 모드 |
| 전류제어기 |
예(토크) |
| 속도제어기 (클로즈드루프) |
예 |
| 위치제어기 |
예 |
| 전기적 데이터 |
| 구동 전압 Vcc (min.) |
10 V |
| 구동 전압 Vcc (max.) |
50 V |
| 선택 로직 공급 전압 Vc(min.) |
10 V |
| 선택 로직 공급 전압 Vc(max.) |
50 V |
| 최대 출력 전압(Factor * Vcc) |
0.9 |
| 최대 출력 전류 Imax |
15 A |
| 최대 출력 전류 지속 시간 Imax |
3 s |
| 연속 출력 전류 Icont |
5 A |
| 출력단 PWM 주파수 |
50 kHz |
| PI 전류제어 샘플링 주파수 |
25 kHz |
| PI 속도제어 샘플링 주파수 |
2.5 kHz |
| PID 위치제어 샘플링 주파수 |
2.5 kHz |
| 최대 효율 |
97 % |
| 최대 속도(DC) |
100000 rpm |
| 최대 속도 (EC 1 폴페어) 블록정류 |
100000 rpm |
| 최대 속도 (EC 1 폴페어) 사인파정류 |
50000 rpm |
| 입력 |
| 홀 센서 시그널 |
H1, H2, H3 |
| 엔코더 시그널 |
A, A\, B, B\, I, I\ |
| 최대 엔코더 입력 주파수 |
6.2 MHz |
| 센서-신호 |
A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ |
| 디지털 입력 |
8 |
| 디지털 입력 기능 |
limit switch, reference switch, general purpose, touch probe |
| 아날로그 입력 |
2 |
| 분해능, 범위, 회로 |
12bit, -10…+10V, 디퍼렌셜 |
| 아날로그 입력 기능 |
General Purpose, Set Value Current, Set Value Velocity |
| 출력 |
| 디지털 출력 |
3 |
| 디지털 출력 기능 |
브레이크 제동, 범용 기능 |
| 아날로그 출력 |
2 |
| 분해능, 범위 |
12bit, -4…+4V |
| 아날로그 출력 기능 |
General Purpose |
| 전압 출력 |
| 홀센서 공급 전압 |
'센서 공급 전압' 참조 |
| 엔코더 공급 전압 |
'센서 공급 전압' 참조 |
| 센서-공급 전압 |
+5V DC, 최대 100mA |
| 보조 출력 전압 |
+5 VDC, max. 145 mA |
| 인터페이스 |
| RS232 |
예 |
| USB (최고 속도) |
예 |
| CAN |
예 |
| CANopen |
슬레이브 |
| CANopen application layer |
CiA 301 |
| CANopen frameworks |
CiA 305 |
| CANopen profiles motion control |
CiA 402 |
| RS232-CAN 게이트웨이 |
예 |
| USB-CAN 게이트웨이 |
예 |
| EtherCAT |
IEC 61158 Type 12 Slave (optional) |
| CoE(CAN application layer over EtherCAT) |
CiA 402 |
| FoE(File transfer over EtherCAT) |
예 |
| Distributed Clocks Support |
예 |
| 가변 PDO-mapping |
예 |
| 표시 |
| 레디 상태 표시 |
녹색 LED |
| 에러 상태 표시 |
적색 LED |
| 보호 기능 |
| 보호 기능 |
전류 차단, 과전류, 과열, 전압 부족, 과전압, 과도 전압, 모터 케이블의 단락, 피드백 신호의 손실 |
| 주위조건 |
| 구동온도 (min.) |
-30 °C |
| 구동온도 (max.) |
45 °C |
| 온도 - 확장된 범위 |
+45…+75°C, Derating: -0.167A/°C |
| 보관온도 (min.) |
-40 °C |
| 보관온도 (max.) |
85 °C |
| 습도 (응축현상 없음) (min.) |
5 % |
| 습도 (응축현상 없음) (max.) |
90 % |
| 기계적 데이터 |
| 무게 |
17 g |
| 규격 (길이) |
53.8 mm |
| 규격 (너비) |
38.8 mm |
| 규격 (높이) |
11.1 mm |
| 마운팅 나사 |
1.27mm 피치의 소켓 단자판에 장착 가능, M2.5 나사용 장착홀 |
| 소프트웨어 |
| 설치 프로그램 |
EPOS Setup |
| 그래픽 유저 인터페이스 |
EPOS Studio |
| 구동 시스템 |
Windows 11, 10 |
| PC용 윈도우 DLL |
32/64bit |
| PC master |
IXXAT, Vector, National Instruments, Kvaser |
| 프로그래밍 예제 |
MS Visual C#, MS Visual C++, MS Visual Basic, MS Visual Basic.NET, Borland C++, Borland Delphi, NI LabView, NI LabWindows/CVI |
| Linux Shared Object Library |
X86 32-/64-bit, ARMv6/v7/v8 32-bit, ARMv8 64-bit |
| CAN Interfaces |
IXXAT, Kvaser |
| 프로그래밍 예제 |
C++ |
| 기능 |
| CANopen Profile Position Mode |
예 |
| CANopen Profile Velocity Mode |
예 |
| CANopen Homing Mode |
예 |
| CANopen Cyclic Synchronuous Position |
예 |
| CANopen Cyclic Synchronuous Velocity |
예 |
| CANopen Cyclic Synchronuous Torque |
예 |
| 아날로그 설정값 명령어 |
예 |
| Position Control Feed Forward |
예 |
| Velocity Control Feed Forward |
예 |
| 듀얼 루프 위치 및 속도 제어 |
예 |
| Position Marker / Touch Probe |
예 |
| Quickstop |
예 |
| 인에이블 |
예 |
| 브레이크 제동 제어 |
예 |
| STO(Safe Torque Off) |
yes (not certified) |
| 고급 자동 제어 설정 |
예 |
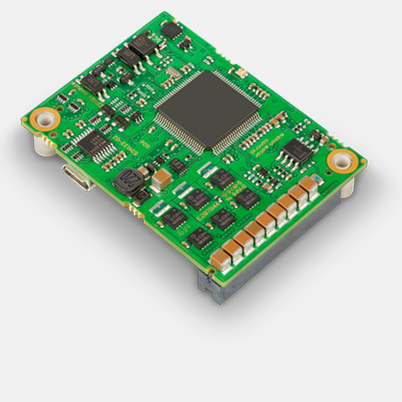
설명
EPOS4 Module 50/5는 고객 시스템의 통합을 위한 동적 OEM 위치 제어기 모듈로 최대 250W/750W급의 엔코더 장착형 브러시 DC 모터 및 홀센서 버전의 엔코더 장착형 브러시리스 EC 모터(BLDC)에 맞게 설계되었습니다.
동영상